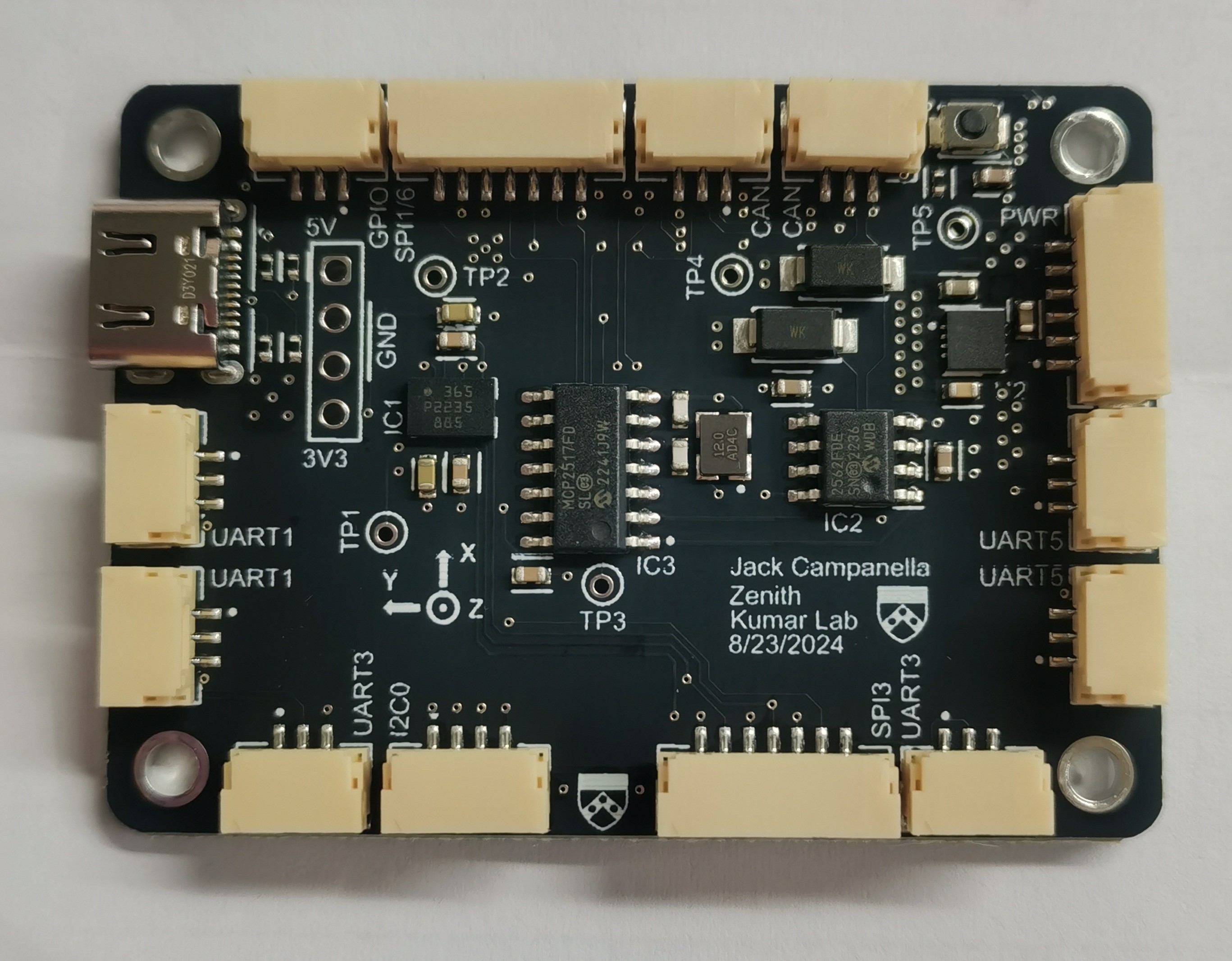
ongoing work, with Jack Campanella and Vijay Kumar
In ongoing work, we are developing an aerial manipulator suitable for dynamic aerial interaction tasks, actuating the arm via a differential transmission with powerful brushless motors located on the vehicle base. Custom electronics interface all sensors and actuators directly with an onboard Raspberry Pi Compute Module 4 running real-time Ubuntu and ROS 2, using the ros2_control framework.