
Robockey
Design of Mechatronic Systems, Fall 2016
with Diego Caporale, Matt Oslin, and Garret Wenger

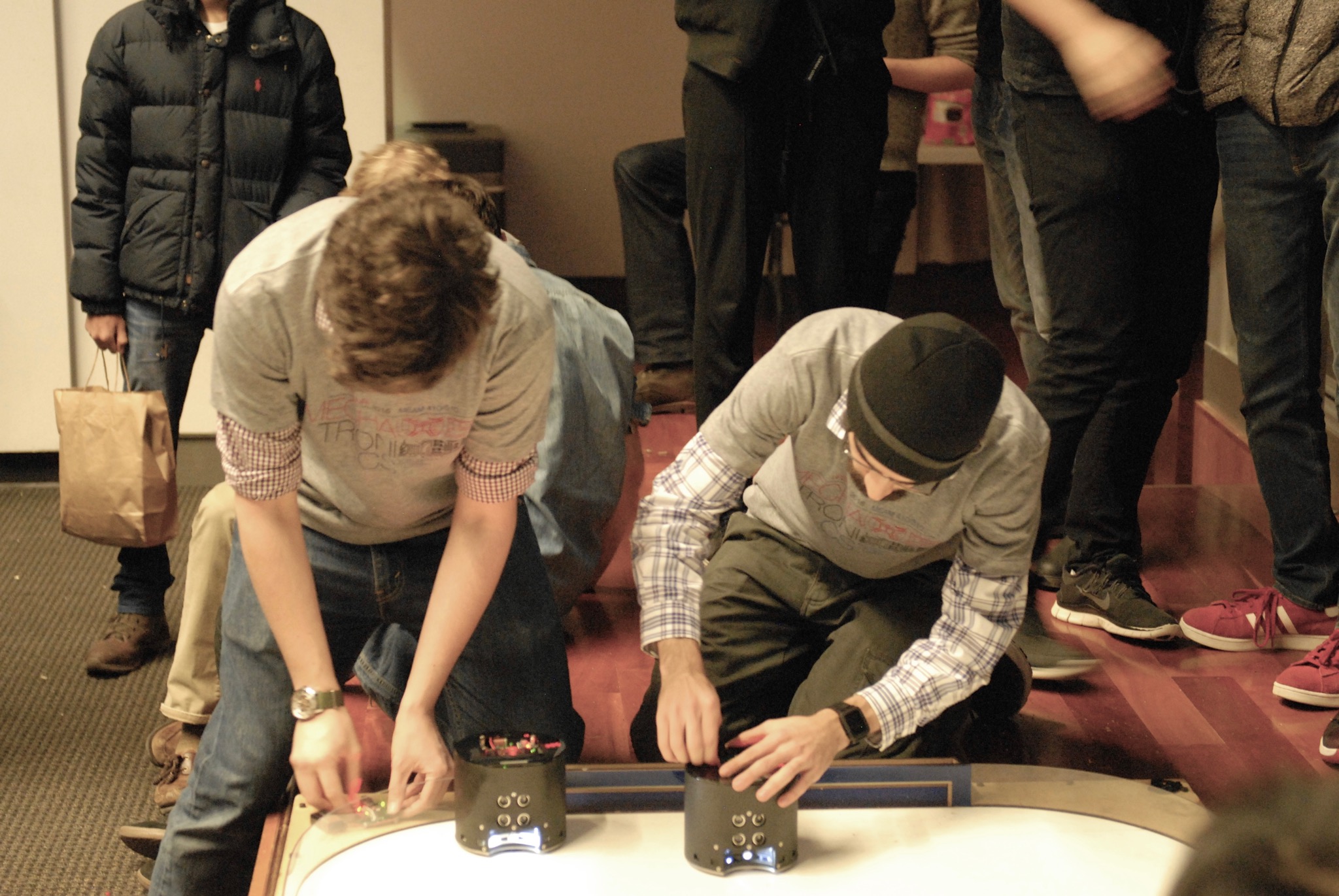
The final project of MEAM 510: Design of Mechatronic Systems - Robockey, a tournament in which teams of up to four students build three robots capable of playing hockey against each other completely autonomously. In this month-long race to the finish, each team was tasked with developing a system capable of localizing an infrared-emitting puck, providing odometry within the competition rink using a constellation of infrared stars tracked by a camera from a Wii remote, controlling the robot to pursue the puck and score, and pack enough pushing power and weight into the robot to maintain authority in the rink. Then – make two more of them before competition day.
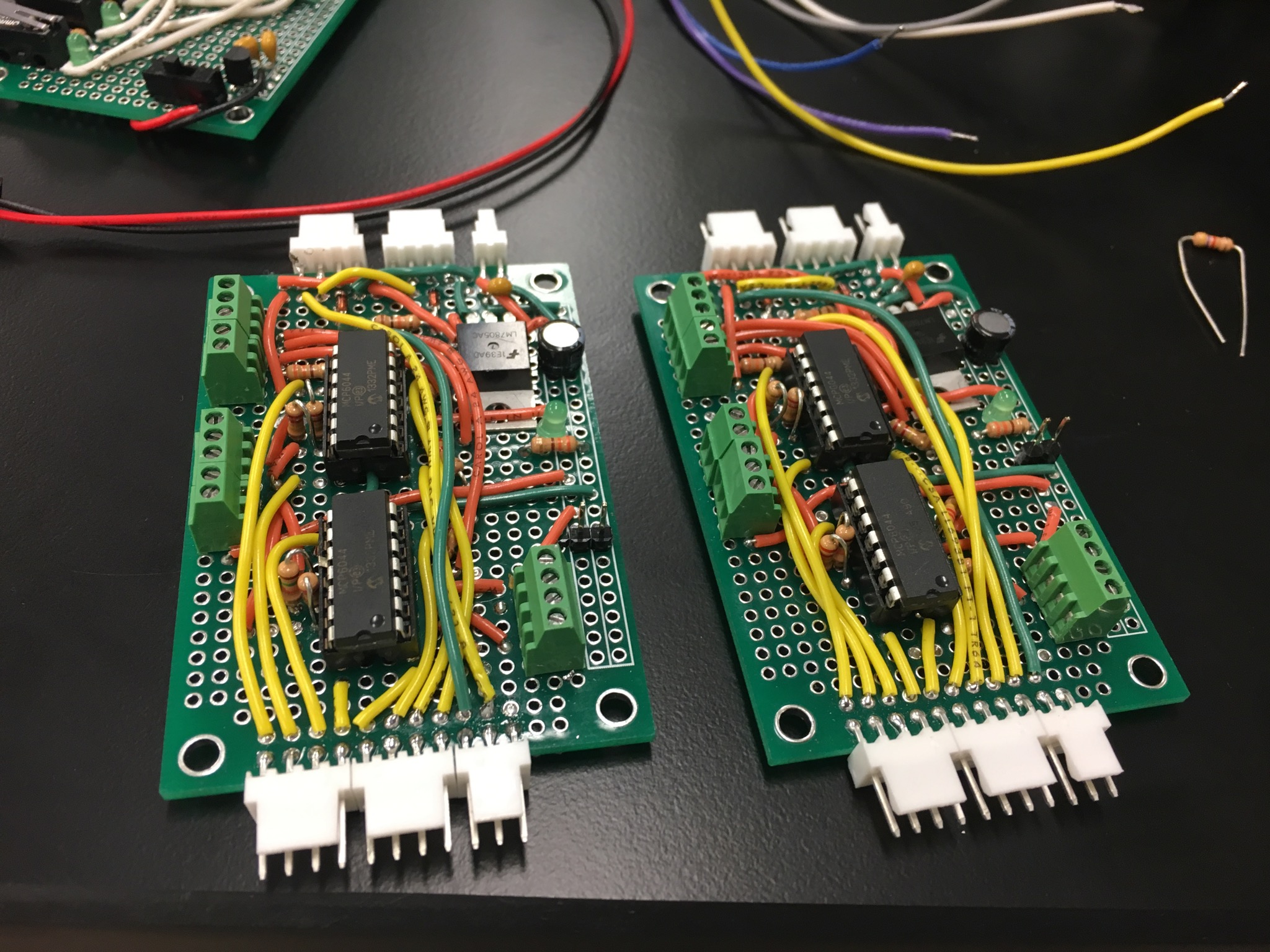





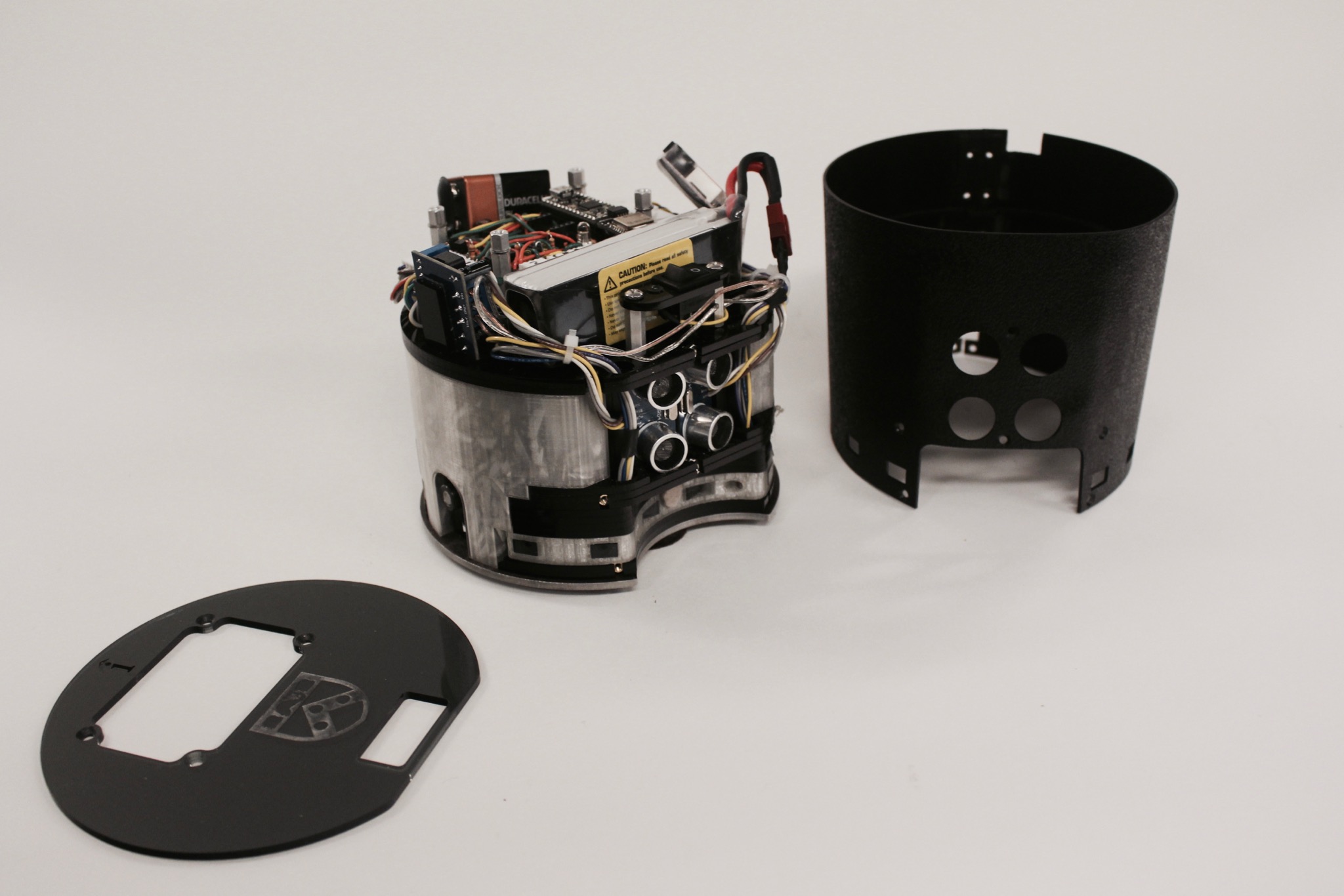

Our robots were equipped with solenoid goal-shooting mechanisms and ultrasonic sensors to detect the presence of an opponent in their line of fire. A behavior state machine enabled robots to manage various goals depending on the state of the game, such as hysteretic offensive-defensive behavior switching for the goalie.
We took first place on tournament day!